兆水科技有限公司
CAE軟體代理、專業CAE分析工程顧問
螺槳空蝕CFD模擬-Cavitation CFD simulation on a propeller
螺槳空蝕CFD模擬-Cavitation CFD simulation on a propeller 全文摘要
本文探討了Cavitation flow空蝕流(尤其是螺旋槳周圍的流)模擬面臨的諸多挑戰。首先重點介紹了各種誤差的來源:幾何體精度、網格品質和細度、紊流建模和空蝕建模,然後討論了不同來源的誤差之間的相互作用。接下來描述了螺旋槳上游流的湍流的重要性以及考慮該因素的難度。本文重點關注了梢渦空化和尺度效應的預測。我們還將Simcenter STAR-CCM+ 軟體模擬的結果與獨立造船研究所 SVA Potsdam GmbH 的實驗資料進行了比較,但未對船體、螺旋槳和槳舵周圍的流進行全尺寸分析,因為沒有可用的實驗資料。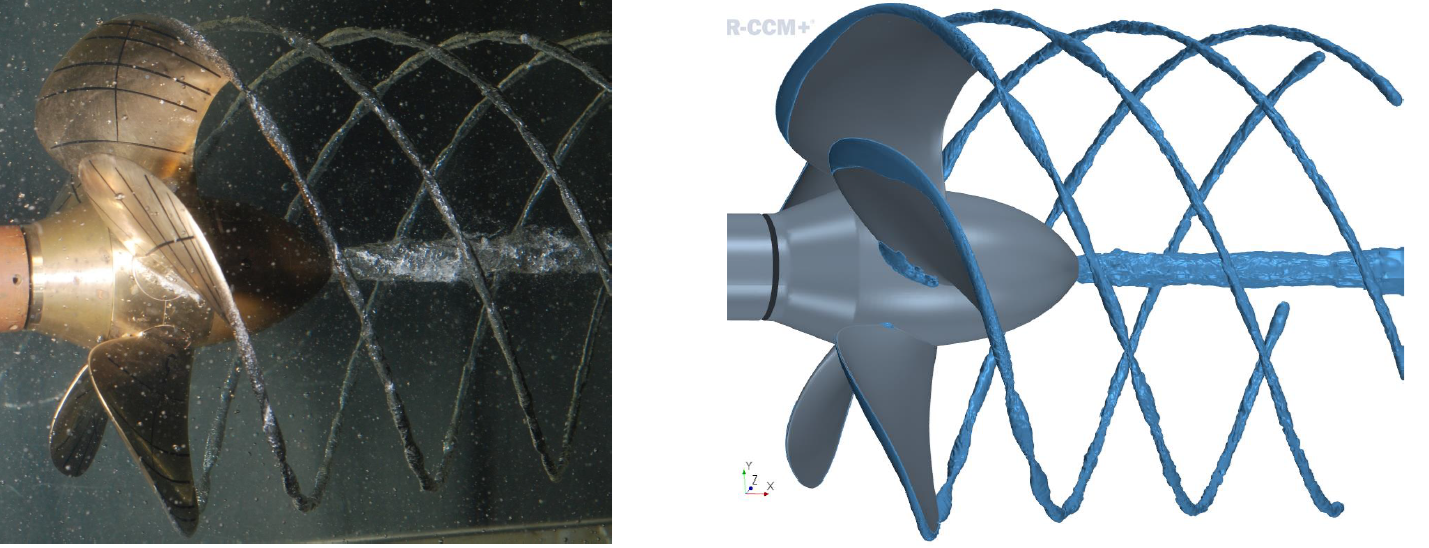
精選本文目錄:
序言
空蝕現象常見於許多流中,特別是旋轉機械(渦輪機、泵、螺旋槳)中和閥門周圍。產生的主要原因是流動加速,導致壓力低於給定溫度的飽和水準。關於流動加速的一個典型例子是螺旋槳的前緣;最低壓力通常出現在靠近前緣的吸力面。然而,壁振動也會導致流動加速,尤其是在高頻率和 / 或高運動幅度下。在大多數空化流中,與總流速相比,蒸發的液體量相對較少。相變所需的熱量來自周圍的液體,但由於蒸發的液體量較少,通常假設液體中的溫度保持恒定。
相變發生在液相和氣相之間的介面處。完全純淨的、不含任何固體顆粒或不凝性氣體氣泡的液體可以承受由負絕對壓力引起的巨大拉伸應力。據我們所知,在水中測量到的空化前最低壓力是 –280 bar(1)。 然而,工程領域和自然界中很少有純淨的液體;它們包含種氣泡(空氣等不凝性氣體的氣泡或固體顆粒縫隙中包含的氣體),相變便是從其中開始,從而產生更大的空化氣泡。在一些氣泡停留時間相對較長的流區(例如回流區),氣泡會變得很大,以至於合併形成蒸汽層或雲。
空蝕現象不僅會對流裝置的性能產生不利影響,還會導致振動、噪音和侵蝕,甚至可能導致結構損壞。因此,重要的是能夠以可接受的精度預測在特定工作點是否會發生空化現象以及發生哪種空化現象,以便採取緩解措施。
如今,人們經常使用計算方法來研究此類流特徵。計算流體動力學 (CFD) 在新產品的開發及其優化中發揮著重要作用,是對產品開發採取的虛擬或綜合數位化雙胞胎方法的一部分。複雜的幾何體可以直接從電腦輔助設計 (CAD) 工具中導入,然後自動生成計算網格,還可以在需要更高解析度以捕獲要注意的特徵的地方進行局部細化。然後在該網格上求解Navior -Stokes方程式以預測流體行為。
大多數發生空化的工程流都是湍流,這對於船舶和螺旋槳周圍的全尺寸流尤其如此。因為我們無法解決空間和時間中的所有湍流波動,所以我們不能使用純納維- 斯托克斯方程來模擬此類流。在計算船體周圍的流時,無論是包括還是不包括螺旋槳,我們改為使用雷諾平均Navior -Stokes (RANS) 方程式,其中有許多湍流模型可以用來考慮湍流因素的影響。最廣泛使用的模型是渦粘性類型;這類模型通過求解兩個附加方程來確定湍流粘度。然後將湍流粘度(在求解域內可能會發生幾個數量級的變化)添加到流體粘度中。有關基於 RANS 的模擬方法的更多詳細資訊,請參閱有關該主題的書籍和其中的參考資料(2,3,4,5)。
當雷諾數適中時,例如對模型尺寸螺旋槳周圍的流進行模擬時,可以使用基於大渦模擬 (LES) 的方法,其中求解經過篩選的Navior -Stokes方程式。這樣既解析了紊流頻譜中較大的尺度,又對更小、更通用的尺度進行了建模。與 RANS 方法相比,這種方法需要使用更精細的網格和更小的時間步長,因此計算量更大。亞網格尺度湍流建模通常使用代數模型來實現,例如Smagorinsky 模型(6)。
空蝕和多相流也是無法完全解析的工程流特徵。這兩個因素也要建模,這意味著以 CFD 求解的方程並不準確。因此,必須牢記 CFD 僅提供近似解,其中始終包含不同來源的誤差。在本白皮書中,我們考慮了船舶螺旋槳空化模擬的重要方面,並評估了潛在誤差對模擬精度的相對影響以及如何減少誤差。
1.空蝕模擬中要考慮的誤差
反覆運算誤差的發生是因為我們以反覆運算方式求解離散的控制方程,必須在某個階段停止反覆運算。通過監控特別值得注意的殘差和數量,例如螺旋槳上的推力和扭矩, 這些誤差相對容易控制。當殘差減少大約 4 個數量級時,我們可以預見,變數值的最高三位元數字不會變化,這通常就足夠了;此時相對應的反覆運算誤差為0.1% 或更低。
離散化誤差取決於不同離散化步驟中選用的近似方法。這些近似方法包括表面、體積和時間積分近似; 解插值到計算點以外的位置;梯度近似,等等。它們還取決於計算網格的屬性。對於給定的選擇,只能通過細化網格來減少離散化誤差。然而,如果原始的網格設計不適合解析所有相關的流特徵,那麼比較一系列系統細化網格的結果則可能具有欺騙性。我們將在下文詳細討論這一點。
建模誤差通常是最大的,也是最難以估算的。此類誤差的可能來源有很多,主要有:
後續部分將更詳細地討論建模誤差的前三個原因。
數值模擬的準確性難以評估的原因是,不同來源的誤差會相互影響:它們可能會部分抵消或相互增強,具體取決於它們的符號和大小。為了儘量降低這種影響,我們需要確保反覆運算誤差至少比離散化誤差低一個數量級,並且離散化誤差至少比建模誤差低一個數量級。
本文的其餘部分探討了空蝕模擬所面臨的挑戰。Simcenter STAR-CCM+ 是 Siemens Digital Industries Software 旗下綜合性、集成式軟體和服務Xcelerator ™ 產品組合的一部分,以下部分將簡要描述其中提供的兩種空蝕模型,接著將討論二維近似方法對於空蝕模擬的適用性。接著還將討論模擬中求解域幾何體表示的準確性。然後,我們還將用一節專門討論湍流建模方法的影響。第 6 節將專門討論初生空蝕,第 7 節將討論螺槳翼梢渦流空蝕化的預測。第 8 節將以單個近壁氣泡的生長和潰滅為例,對解自適應網格調整細化 的優點進行探討。最後是對尺度效應的評估以及結語。
2.Simcenter STAR-CCM+ 中的空蝕模型
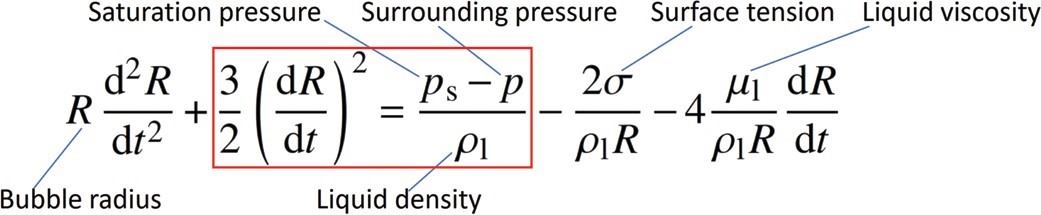
大多數空蝕模型基於這樣的假設:液體包含種氣泡, 當壓力低於飽和壓力時,其中會產生空蝕氣泡。每立方米液體的種氣泡數及其初始直徑是模型的參數,通過這些參數可以將液體純度納入考慮範圍。建模基於均質兩相流假設:求解單一有效流體的運動方程,另外通過求解蒸汽體積分數方程來確定氣相和液相分佈。這類似于用於自由表面流的流體體積 (VOF) 方法,但有兩處區別。首先,空化的蒸汽體積分數方程包含一個源項,它控制空蝕氣泡的生長和潰滅。其次,空蝕流中的蒸汽體積分數可以在 0 和 1 之間平滑變化,而在自由表面流中,則假設相之間存在尖銳介面。源項基於估計的氣泡生長率或潰滅率。
Simcenter STAR-CCM+ 是西門子的多物理場 CFD 軟體。其中包含兩個空蝕模型,它們在確定氣泡生長率或潰滅率的方式上有所不同:
完整的 Rayleigh-Plesset 模型需要更小的時間步長, 因此計算成本高於更簡單的 Schnerr-Sauer 模型。後者是穩健的模型,在大多數工程應用方案中的求解精度可以接受,相關敘述參見後續部分。其他來源的誤差經常會被歸咎於該模型。
使用者還可以為特定應用校準 Schnerr-Sauer 模型,方法是使用兩個函數將蒸汽體積分數方程中的正(氣泡生長)和負(氣泡潰滅)源項相乘。
3.二維近似
當幾何體呈軸對稱或在展向方向上沒有變化時,通常使用二維近似方法來減少計算工作量。如果流在統計上是穩定的,這通常是合理的。然而,空化流通常是非常不穩定的。這方面的一個例子是雲空化,其特徵是蒸汽雲的週期性生長和分離。非定常流通常具有很強的三維特性。通過在二維模擬中將速度場限制為二維,實驗中觀察到的許多空蝕流特徵都無法充分進行模擬。螺旋槳和槳舵上的雲空蝕就是一個很好的例子。
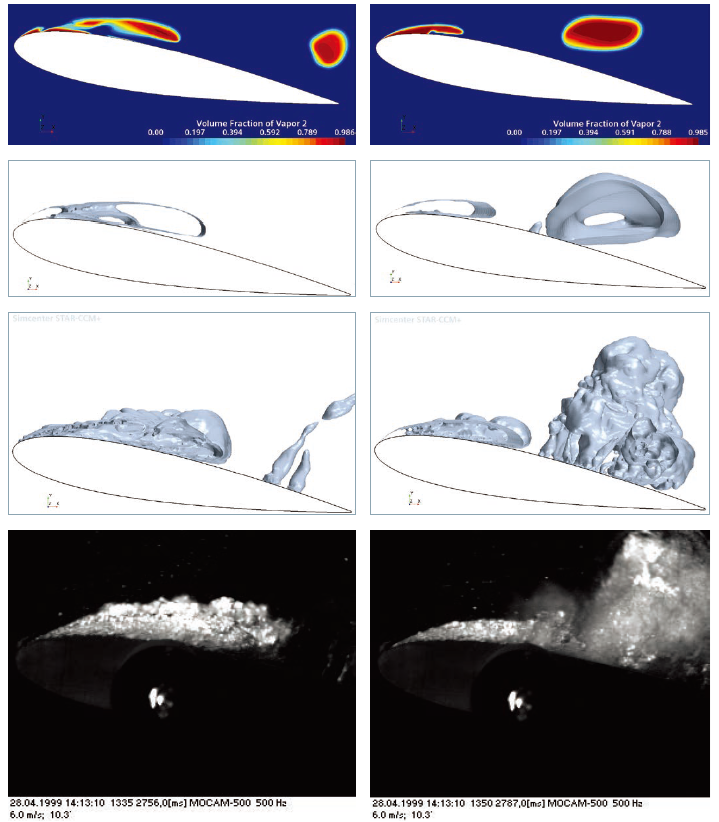
圖 1.NACA0015 水翼上的空化(跨越空化水筒側壁):二維非定常 RANS 模擬中蒸汽體積分數的分佈(第一行),三維非定常 RANS 模擬(第二行)和 LES模擬(第三行)中的蒸汽體積分數 0.05 的等值面側視圖,HSVA Hamburg 進行的實驗中觀察到的空化氣泡的側視圖(第四行)。
圖 1 顯示的是來自二維和三維 RANS 模擬以及 LES 模擬的代表性圖片,使用的工具為 Simcenter STAR-CCM+, 空蝕模型為 Schnerr-Sauer, 物件為 10.3 度迎角 NACA0015 水翼周圍的流。水翼的弦長為 0.2 米 (m),流速為 6 米每秒 (m/s),空化水筒中的絕對壓力為 32,900 帕斯卡 (Pa),給定溫度下水的飽和壓力為 2,300 Pa( 空蝕數 1.7)。為了進行比較, 圖中還顯示了在 HSVA Hamburg 進行的實驗的結果。8 二維模擬中預測了大空蝕區的形成及其脫離,但流的特徵與實驗中觀察到的現象有很大不同。使用 RANS 模型(此處使用預設的 k- ε 模型)的三維模擬顯著提高了求解品質。然而,即便使用最簡單的空蝕模型 (Schnerr-Sauer), 也只有 LES 分析得出的解表現出與實驗結果相似的流特徵。關於比較 RANS 和 LES 的求解,Muzaferija 等人的一項研究也得出了類似結論,(9) 其中還記錄了使用更先進的空蝕模型(完整的Rayleigh-Plesset)的好處
4.幾何外型精確度
在流體流動的數值模擬中,求解域的幾何外型取自 CAD 模型。在螺旋槳的 CAD 模型中,所有葉片都是相同的,它們之間的周向距離也相同。但是,用於模型測試或實際船舶上的製造螺旋槳的幾何形狀通常與 CAD 不同。原因之一是製造公差:鑄造工藝,以及之後的最終表面手工處理和拋光。用於拖拽水池物理測試的模型尺寸螺旋槳的直徑通常在 0.2 到 0.25 m 之間, 因此很難實現 CAD 模型中指定的葉片形狀。國際拖曳水池會議 (ITTC) 在其指南中規定,用於測試的模型尺寸螺旋槳的製造公差應為 0.1 毫米 (mm),前緣後緣應為 0.05 毫米。
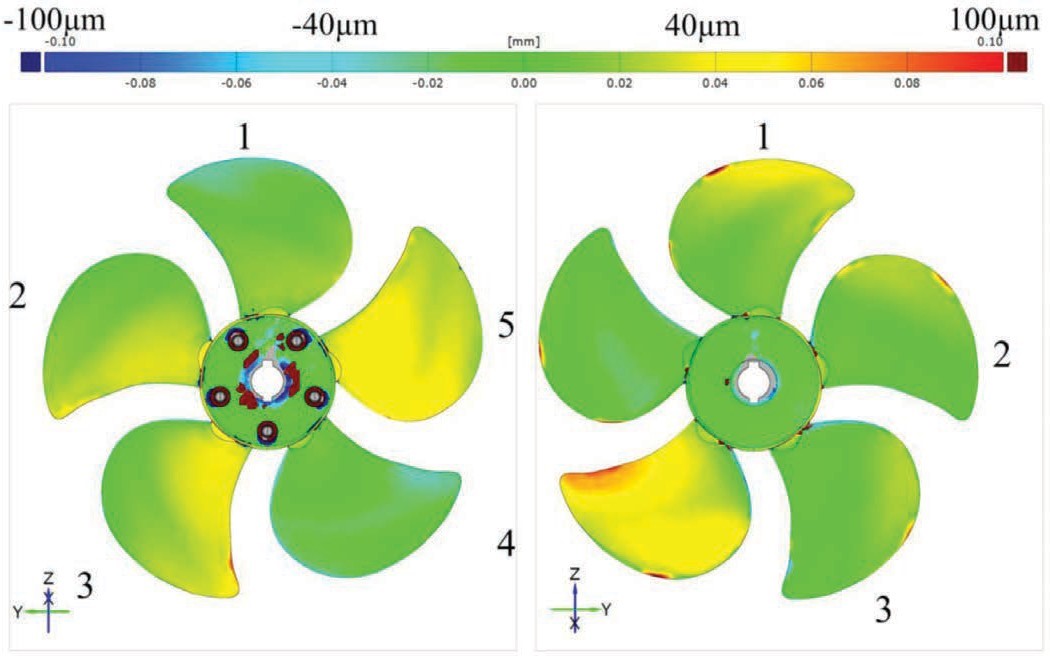 圖 2. 波茨坦螺旋槳測試用例的製造幾何體與 CAD 模型的偏差。
圖 2. 波茨坦螺旋槳測試用例的製造幾何體與 CAD 模型的偏差。
為了評估製造的螺旋槳和 CAD 模型之間的差異,SVAPotsdam10 對其波茨坦螺旋槳測試用例 (PPTC) 的兩個樣品的構造幾何體進行了詳細測量。圖 2 顯示的是所五個葉片的吸力側和壓力側與 CAD 模型的偏差。儘管偏差明顯在 ITTC 建議範圍內,但也很明顯,每個葉片都各不相同。例如,葉片 5 在吸力側幾乎與CAD 幾何外型相同,但在壓力側相差約 0.05 毫米。葉片 4 也是如此,但壓力側是完美的,吸力側最多偏差0.1 毫米。
雖然螺旋槳葉片吸力側和壓力側的光學掃描相對容易,但測量前緣和後緣的形狀卻很困難。自 2016 年以來,SVA Potsdam 已經能夠進行此類測量。他們沿著恒定半徑 r = 0.7R(R 為螺旋槳直徑)的等值線,對兩個版本的 PPTC 螺旋槳(可控螺距和固定螺距)的前緣幾何體進行了詳細評估。圖 3 顯示的是兩個製造螺旋槳的等值線,以及取自 CAD 模型的等值線。CAD 模型幾何體在前緣處有一個明顯的 “鼻子”,曲率半徑很小,然後是兩側很短的一部分,其末端幾乎是直線,較大的曲率半徑將這些線連接到葉片壓力側和吸力側的等值線。相比之下,兩種製造輪廓的前緣曲率的變化都很平滑,雖然在 ITTC 公差範圍內,但與 CAD 形狀明顯不同。這些幾何體的細微差異會對測量的螺旋槳屬性產生重大影響。
CAD 形狀和製造形狀之間的差異可能會顯著影響臨界點線(流沿其分裂為吸入側流和壓力側流)以及可能出現的流分離和空化趨勢。
圖 3 還包括來自 PPTC 螺旋槳周圍流模擬的網格和壓力分佈圖。在此模擬中,靠近壁面的第一個單元的厚度為 0.005 mm,這意味著第一個計算點與壁的無量綱距離接近 y+ = 1。這是求解粘性底層所必需的;例如,在 RANS 計算中使用低雷諾數壁面處理時,或使用 LES 方法進行紊流建模時。通過比較圖 3 中的兩個圖,很明顯,計算網格中的幾個近壁邊界層屬於 CAD輪廓與製造輪廓的差異範圍之內。此外,在兩個製造模型中,葉片都比 CAD 模型中的更厚。在圖 3 所示的葉片部分的中間,厚度差約為 9%。
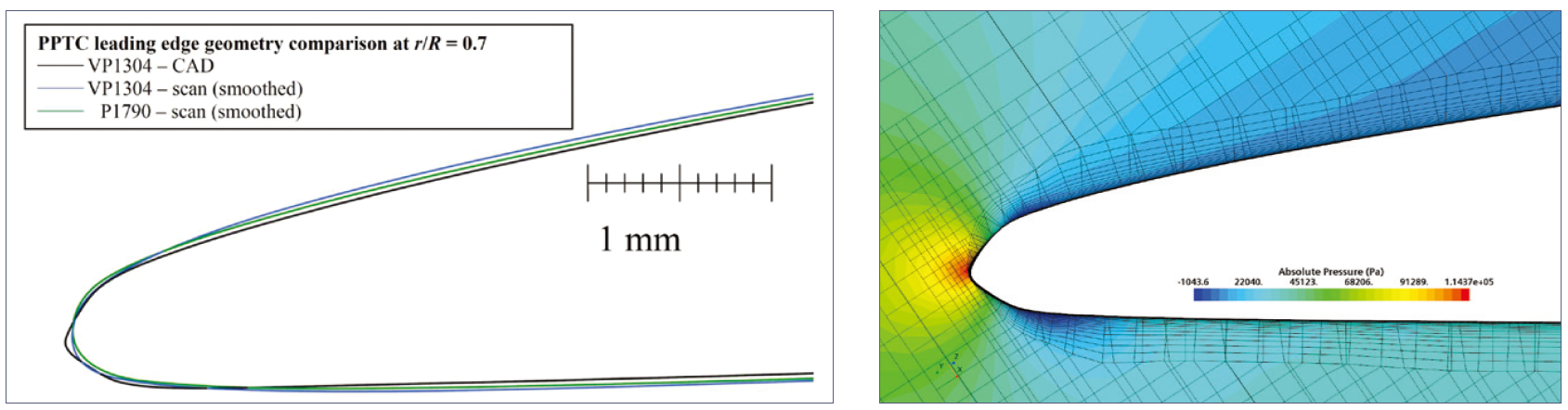
圖 3. 兩個製造葉片的輪廓與 CAD 在 r/R = 0.7 處的偏差(左)以及含 CAD 輪廓周圍壓力分佈情況的剖切面數位網格(右)。
然而,由於沒有製造幾何體的全尺寸 CAD,因此無法在由構造幾何體界定的域中生成用於流模擬的網格。只有通過比較使用 CAD 幾何體和構造幾何體所獲得的解,才能可靠地評估我們在製造的螺旋槳和 CAD 模型之間觀察到的差異的重要性。Jin 等人(11) 研究了簡化的前緣缺陷對翼型周圍二維流的影響,發現允許公差內的缺陷會顯著影響空化的初生。評估單個螺旋槳葉片之間差異的影響也很重要,但這也需要擁有構造幾何體的 CAD 模型。我們希望在不久的將來可以獲得此類資料。
即使我們輸入正確的幾何外型,生成的網格也可能無法準確表示 CAD 幾何外型。如果局部網格不夠細化,很容易錯誤地表示幾何體,尤其是當 CAD 模型包含小曲率半徑的零件時,更是如此。圖 4 中顯示了一個示例,左側是圍繞 PPTC 螺旋槳的多面體網格縱剖面, 右側是兩個網格前緣的表面視圖。在一個網格中,前緣區域被局部細化,因此前緣的曲率得到相對準確的表示,而在另一個網格中,沒有採取特殊措施來細化曲率高的網格。在遠離前緣的部位,兩個網格中的單元大小相似。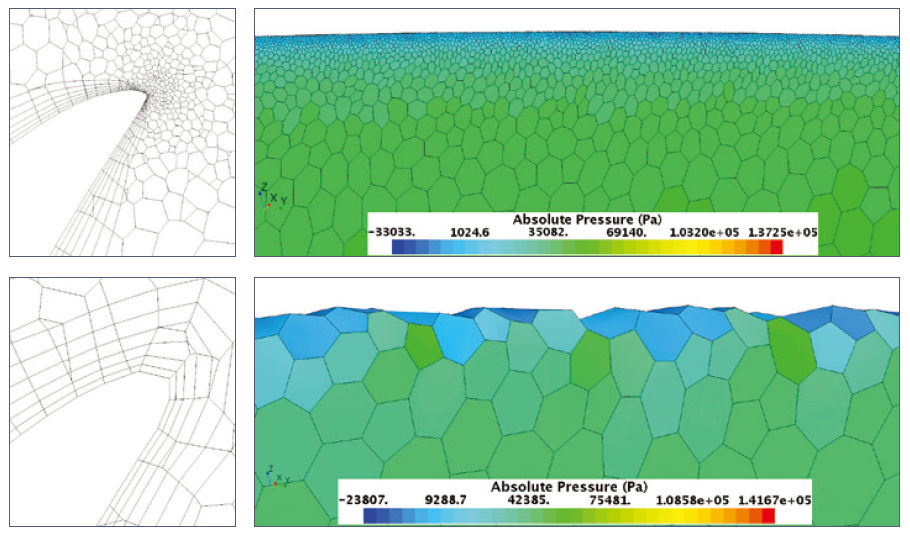
圖 4. 計算網格在螺旋槳葉片的縱截面(左)和吸力側葉片視圖(右)的前緣幾何體表示,上圖為最小單元尺寸為 0.011 mm 的局部細化網格,下圖為最小單元尺寸為 0.176 mm 的粗網格。
從圖 4 中可以看出,前緣幾何體的粗網格表示與 CAD 幾何體相去甚遠。曲率未得到解析且前緣粗糙。顯然,這兩個網格表示的是兩種不同的螺旋槳葉片前緣幾何外型。因此,當我們比較這兩個網格的 CFD 解時,我們會發現差異不僅是由於關鍵區域的單元大小不同,還在於螺旋槳葉片的不同形狀。在本例中,模擬是對在圓周方向上具有週期性條件的單個葉片進行的。粗網格有 930,649 個單元,沿前緣局部細化的網格有 3,309,770 個單元。觀察到前緣解析度的差異後,我們會認為,使用兩個網格所得的解會有顯著差異。粗網格的前緣表達形式生硬粗糙, 表明求解應該會有很大誤差。然而,比較兩個網格上計算的推力和扭矩得到了一個令人驚訝的結果:結果並沒有太大差異!表 1 是在兩個網格上計算的葉片推力和扭矩以及實驗測量值(12)。
在兩個網格上獲得的解之間的差異遠小於任一解與實驗資料之間的差異。有人可能會問:這怎麼可能?答案在於誤差的部分消除。由於網格太粗導致前緣 “粗糙度” 的隨機性,前緣受力局部誤差在大小和正負符號上有所不同。當力在整個葉片上積分時,這些正負誤差會部分相互抵消。然而,我們不能指望每個工作點或每個螺旋槳都會發生這種部分抵消。若要得到可靠的解,尤其是在進行空蝕模擬時,我們需要設計網格以便充分解析重要的幾何體特徵。
 表 1. 兩個網格的結果與 SVA Potsdam 實驗資料比較
表 1. 兩個網格的結果與 SVA Potsdam 實驗資料比較
使用 RANS 方法時,某些流動現象無法很好地捕獲到。例如,螺旋槳葉片吸力側開始形成空化。SVAPotsdam 的實驗觀察表明,在特定條件下,吸力側下游的半個部分會出現空蝕氣泡,如圖 5 中的草圖所示。即使使用非常精細的網格,RANS 模擬也不會生成這樣的空蝕。此處顯示的示例中對單個葉片使用的網格非常精細,具有 2900 萬個單元,並且圓周方向具有週期性條件。使用 LES 模型和相同的網格, 實驗觀察中標示的區域的確出現了空蝕氣泡。因為在RANS 和 LES 模擬中使用的網格和空化模型相同,產生的差異原因顯然只能是紊流建模方法。
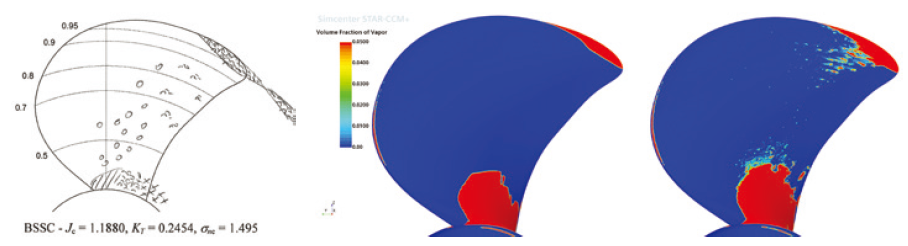 圖 5. 葉片吸力側的空蝕:實驗觀察結果 13(左)、RANS 解(中)和 LES 解的暫態圖片(右)。
圖 5. 葉片吸力側的空蝕:實驗觀察結果 13(左)、RANS 解(中)和 LES 解的暫態圖片(右)。
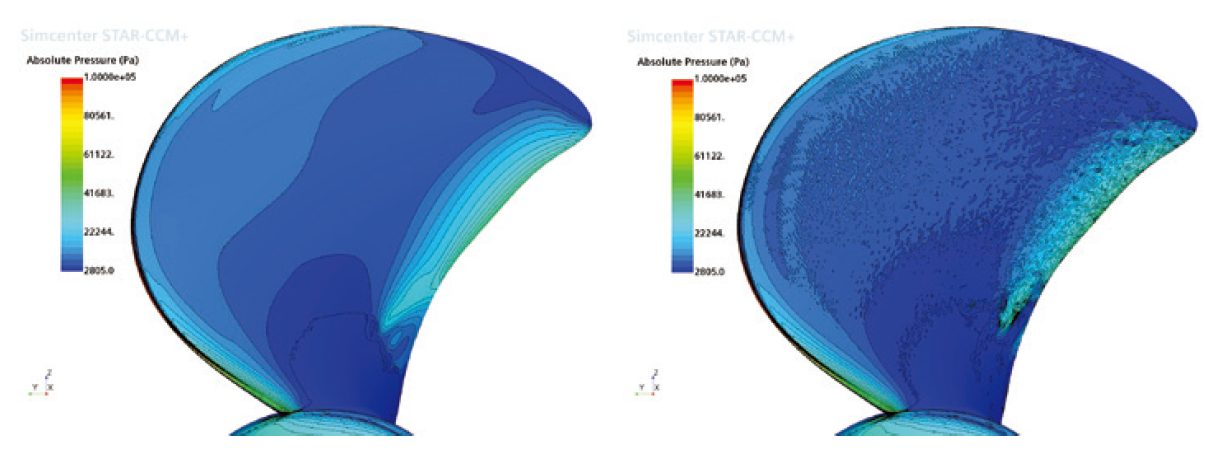
圖 6. 圖 5 條件下 RANS 解(左)和 LES 解(右)的螺旋槳葉片吸入側暫態壓力分佈。
圖 6 解釋了為什麼 RANS 方法無法預測吸入側的空蝕現象。平均壓力低於飽和水準的區域就是圖 5 中可以看到翼梢渦空蝕和葉片根部空蝕的區域。在吸力側葉片表面的其餘部分,壓力高於飽和水準,不會發生空化。儘管 RANS 模擬是使用 SST k- ω 紊流模型在非定常模態下進行的,(5) 實際上解是穩定的,翼梢渦空蝕和葉片根部空蝕的區域的邊緣除外。
在LES 模擬中,速度和壓力的紊流波動被解析到網格尺度。這在圖 6(右)中清晰可見,它表明壓力不僅在葉片表面波動,而且存在局部低壓區。當波動(顫動)邊界層趨向於遠離葉片表面時,就會產生這些小的低壓區。在動畫中,我們可以看到局部低壓區是如何出現、移動一段距離然後消失的。蒸汽氣泡也會發生同樣的情況:在壓力低於飽和壓力時,蒸汽氣泡產生;在壓力再次升至飽和水準之前,氣泡保持移動, 直至潰滅。因此,這種氣泡空化只能通過解析速度和壓力波動的湍流建模方法來預測。RANS 方法不屬於這一類。請注意,圖 5 中的草圖顯示的是長期對氣泡外觀的實驗觀察結果,而 LES 模擬的圖片顯示的是隨時間變化的瞬間動態。
圖 7 顯示了葉片和螺旋槳轂縱截面上的壓力分佈,該分佈是以與之前相同的網格計算的,並比較了 RANS 和 LES 結果。主要特徵相似,但也有重要差異:
這些差異很重要,因為它們構成了槳轂和翼端渦漩空蝕條件的一部分。後面我們將討論這一點。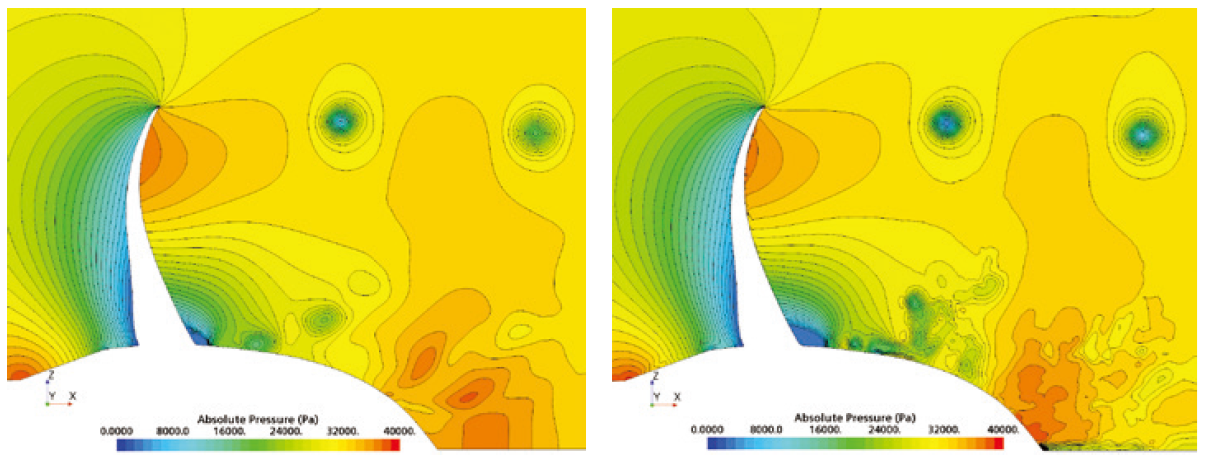
圖 7. 圖 5 條件下 RANS 解(左)和 LES 解(右)的螺旋槳葉片縱截面暫態壓力分佈。
在研究安裝在船舶上的螺旋槳周圍的流時,接近螺旋槳的速度場非常不均勻。這意味著在旋轉過程中,螺旋槳葉片會遇到不同大小和方向的速度以及不同的湍流水準。為了準確預測空化現象,尤其是水聲學,在來流中正確考慮紊流因素很重要,因為這會影響螺旋槳葉片周圍的流。然而,將 LES 模擬應用於整個船體和所有附屬物周圍的流在實際應用中是不可能的,甚至在模型尺寸上也是不可能的。但我們可以對螺旋槳周圍的流進行嵌入式 LES 求解。上游流的湍流波動是從船體周圍流的周圍 RANS 解中重建的。此類模擬才剛剛嶄露頭角 (14,15),預計未來還會有更多此類應用。
如果目的是避免空蝕,則沒有必要對特定蝕化模型使用兩相流分析,而只需確定空化開始的條件即可。從單相分析中,我們可以通過檢查求解域中的壓力分佈來判斷是否會發生空蝕。若有任何位置的壓力低於飽和水準,就會發生空蝕現象。但可能很難確定空蝕現象是否明顯:如果壓力僅在非常小的體積內略低於飽和水準,則流和螺旋槳性能受到的影響可能達不到臨界程度。物理實驗中也沒有明確定義確定空蝕初生的標準:通常,觀察流場的工程師需要決定何時將流歸類為受初生空蝕影響。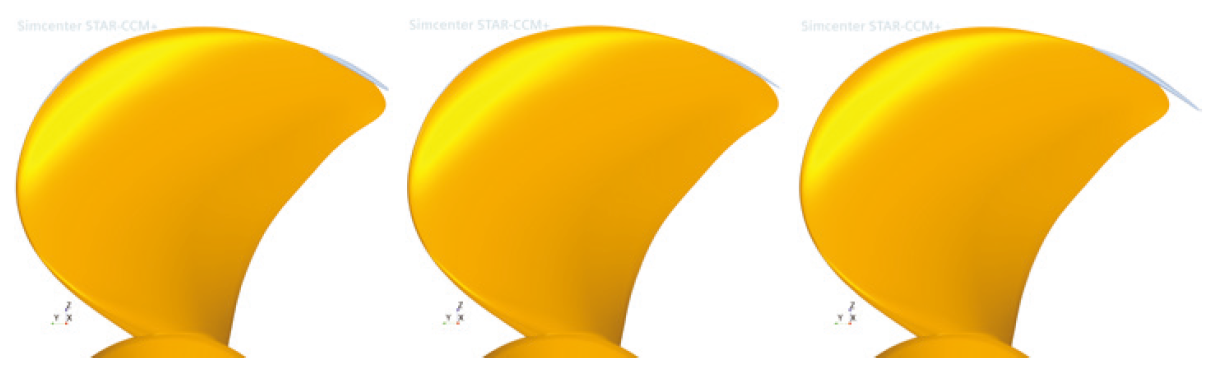
圖 8. 螺旋槳周圍初生空蝕的模擬:使用空蝕模型進行兩相計算的 5% 蒸汽體積分數等值面(左)和飽和壓力等值面(中),以及不使用空化模型進行單相計算的飽和壓力等值面(右)。
圖 8 顯示了使用 Schnerr-Sauer 空化模型對螺旋槳周圍的流進行兩相模擬的飽和壓力(2873 Pa 絕對值) 等值面,以及不使用空蝕模型進行單相流模擬的飽和壓力等值面,並與兩相模擬的 5% 蒸汽體積分數等值面進行比較。當沒有對空化建模時(如右圖所示),低壓區大於兩相流中的情況,也略大於蒸汽體積分數大於 5% 的情況。絕對壓力的最小值也明顯低於兩相流的情況,如圖 9 所示:-23902 Pa 相比於 2732Pa(低於飽和壓力 141 Pa)。
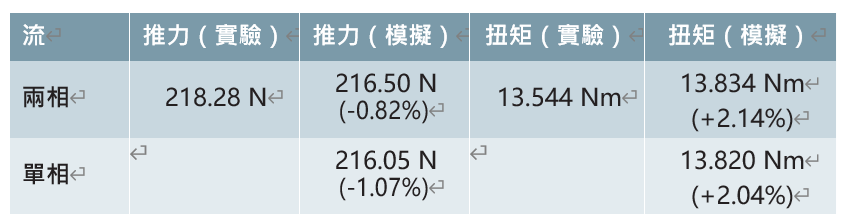 表 2. 對比兩相模擬和單相仿真的解,物件為初生翼梢渦空蝕條件下螺旋槳周圍的流,包含來自 SVA Potsdam 的實驗資料(案例編號 3,第 2.9 頁)。
表 2. 對比兩相模擬和單相仿真的解,物件為初生翼梢渦空蝕條件下螺旋槳周圍的流,包含來自 SVA Potsdam 的實驗資料(案例編號 3,第 2.9 頁)。
儘管初生空蝕的單相和兩相流模擬在這些細節上存在差異,但工程領域關注的積分量並沒有太大差異, 如表 2 所示。單相模擬的預測推力僅比兩相模擬低0.25%,而扭矩差異僅為 0.1%。
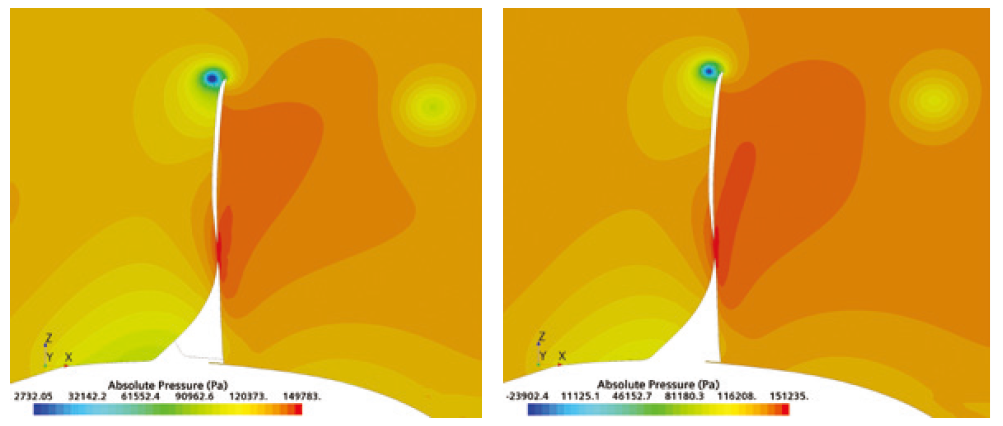
圖 9. 圖 8 中兩相模擬(左)和單相模擬(右)中與等值面正交的螺旋槳葉片截面壓力分佈
單相預測僅足以確定空蝕的第一次出現。在許多情況下,空蝕在流場中不止會在一個位置發生,可能的位置有葉片前緣、葉根、翼端渦漩和轂渦。既然如此,必須使用兩相模擬來預測螺旋槳性能,因為空化不會在所有位置同時開始。請注意,即使空化模型在兩相流模擬中處於活動狀態時,液相中也可能會產生負絕對壓力。在渦流和回流區內,蒸汽氣泡的停留時間足夠長,壓力保持在接近飽和壓力。然而,在流加速度高且停留時間短的流區域中,液體中的壓力可能會變低,導致氣泡生長率高,但蒸汽體積分數不一定高。下一節將介紹一個示例
預測翼端渦漩空蝕一直是一個巨大的挑戰。長期以來,人們一直認為 CFD 中使用的空蝕模型(如此處使用的Schnerr-Sauer 模型)無法預測這種類型的空蝕。這種觀點在依賴網格的常規研究中得到印證,這些研究表明,進一步細化不會使解產生顯著變化,因為推力和扭矩的收斂性很好,而翼端渦漩空蝕僅限於靠近葉尖的一小塊區域。
翼端渦漩空蝕可以通過創建渦量等值面來實現視覺化,如圖 10 所示。通過將這個渦量等值面內的網格局部細化到足夠低的水準,我們可以更好地解析梢渦中極高的速度和壓力梯度。圖 11 顯示了這種局部細化網格的截面。在這個單葉片示例中,圓周方向具有週期性條件,單元總數為 473 萬。梢渦內的單元大小為0.234 毫米(D/1068,其中 D 為螺旋槳直徑,此處為 250 毫米)。轂渦區內的網格也進行了細化。流向為從左到右;設置參數對應於 SVA Potsdam 報告第2.13 頁上的案例編號 5。12 另外通過將各個方向上各處的單元大小減小 1.5 倍進一步細化了網格。這個網格有大約 1700 萬個單元。
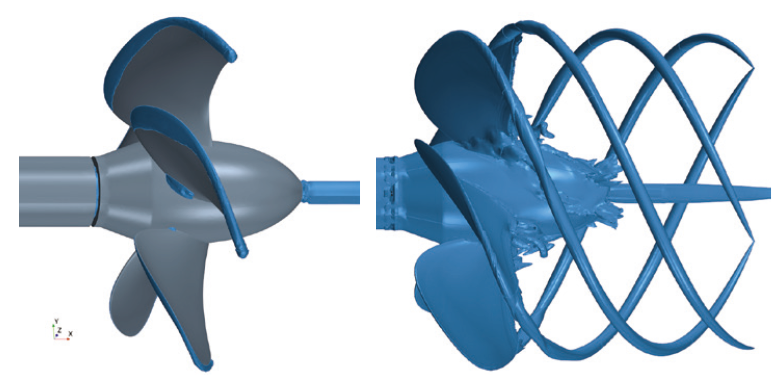
圖 10.5% 蒸汽體積分數(左)和渦量大小(右)等值面;使用雷諾平均Navior -Stokes方程式以及一個版本的 k- ε 紊流模型和 Schnerr-Sauer 空蝕模型進行計算。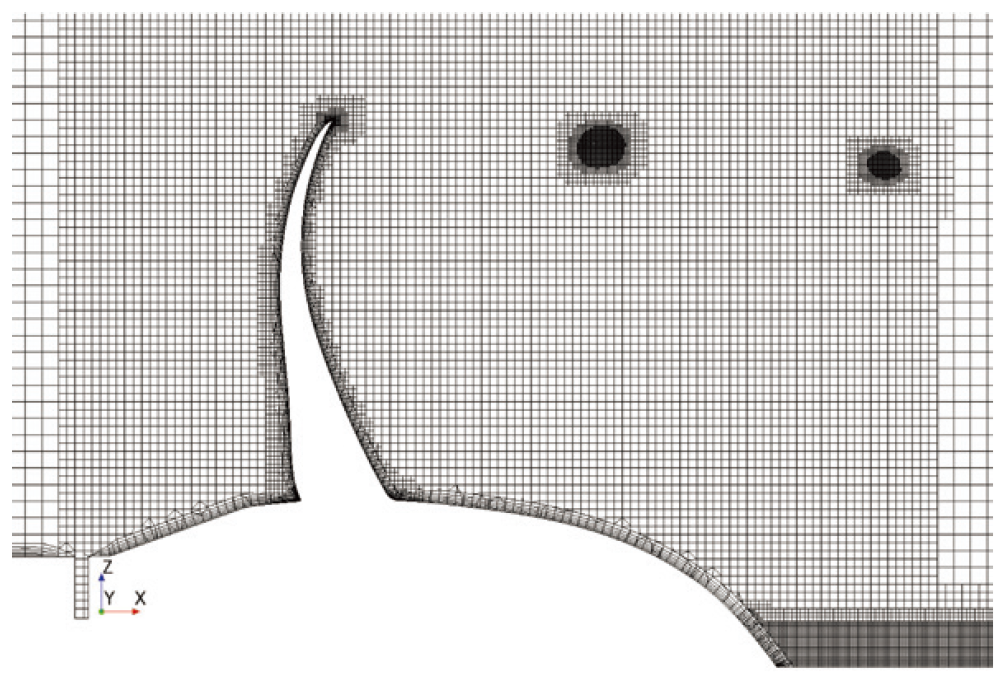
圖 11. 計算網格縱截面,顯示的是圖 10 中渦量等值面所指示梢渦區域內的局部細化。
使用局部細化網格(圖 11)並以採用一個版本的 k- ε 湍流模型和 Schnerr-Sauer 空化模型的 RANS 方程進行的模擬如圖 12 所示。該模擬表明,與沒有進行局部網格細化的結果(圖 10)相比,空化預測有所改進。即使使用單個葉片具有 1700 萬個單元的最精細
網格,改進也非常有限,如圖 12 所示:即使網格被細化到更長的距離,翼端渦漩空蝕也很快結束。推力比實驗中小 1.8%,因此預測相對較好。然而,在翼端渦漩區沒有局部細化和空蝕的網格上,推力的預測結果也同樣不錯。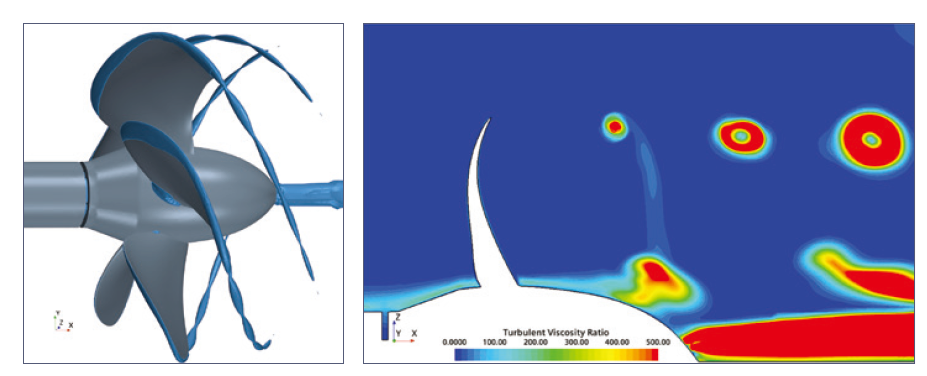
圖 12.5% 蒸汽體積分數的等值面(左)和湍流粘度比的等值線(右),來自螺旋槳周圍流的 RANS 計算,使用局部細化網格,單個葉片具有 1700 萬個單元。
在最精細的網格中,甚至可以對湍流建模使用 LES 方法。在本例中,壁面自我調整局部渦粘性 (WALE) 模型用於湍流的未解析部分,16 但壁面附近的網格不夠精細,無法完全解析螺旋槳葉片邊界層的粘性底層。然而,這裡的重點是捕獲梢渦空化。為此,壁面處理從圖 13 中可以看出,對湍流使用 LES 方法可以很好地捕獲梢渦空化。蒸汽體積分數 0.05 的等值面圖片看起來與實驗中拍攝的梢渦空化照片相似。13 這說明湍流模型對梢渦空化預測的作用比空化模型更重要; 當與 LES 一起應用時,簡單的 Schnerr-Sauer 模型可以得到很好的解。
從 LES 模擬中獲得的推力高出 4%;這可能是由於靠近壁面的網格不夠精細。DES 方法在當前網格足夠的近壁區域使用 RANS 方法,而在遠離壁面的區域使用LES。對於預測螺旋槳葉片周圍的流,這似乎是個不 錯的選擇。的確,使用改進的延遲 DES 獲得的結果 17 能夠得到最好的解:梢渦空化延伸到網格足夠精細的位置,與 LES 中一樣,但推力現在僅比測量值低1.5%,與 RANS 的解同樣好。該結果還具有足夠的梢渦空化解析度(見圖 14)。
問題是,為什麼紊流模型對於捕捉翼端渦漩空蝕如此重要?比較圖 12 和 14 中所示的 RANS 和 DES 模擬的湍流粘度比(紊流粘度與流體粘度之比)即可知道答案。雖然在 DES 和 LES 模擬中,翼端渦漩區域的紊流粘度無關緊要,但每個 RANS 模型都會產生高紊流粘度。這就會導致速度梯度變得模糊,進而導致壓力增加。一旦梢渦區域的壓力變得高於飽和水準,空化就會停止。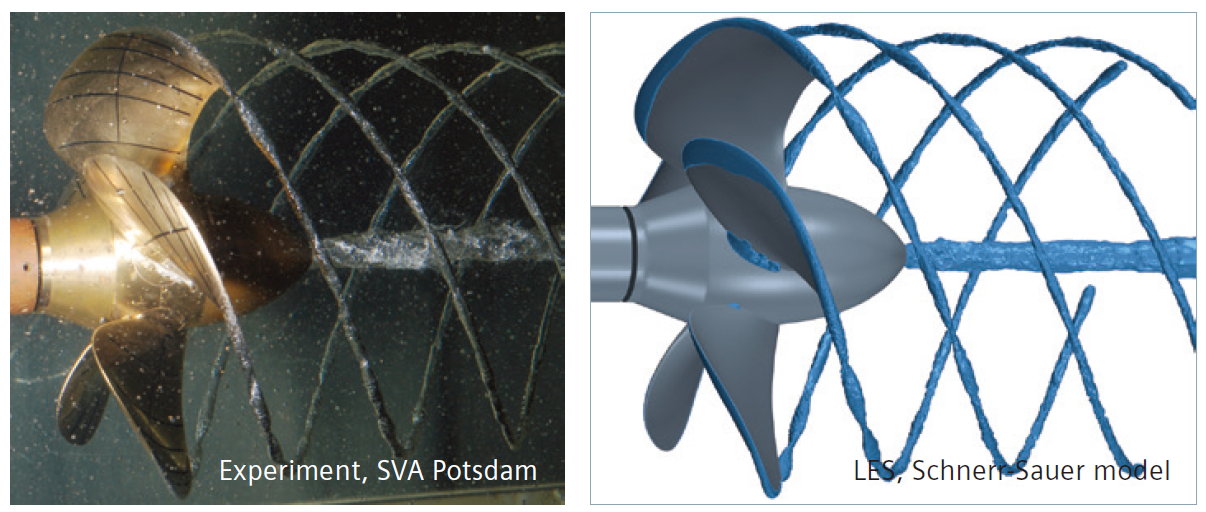
圖 13. 實驗中翼端渦漩空蝕的照片(左)和 5% 蒸汽體積分數的等值面(右),來自螺旋槳周圍流的 LES 計算,使用單個葉片具有 1700 萬個單元的最精細網格。
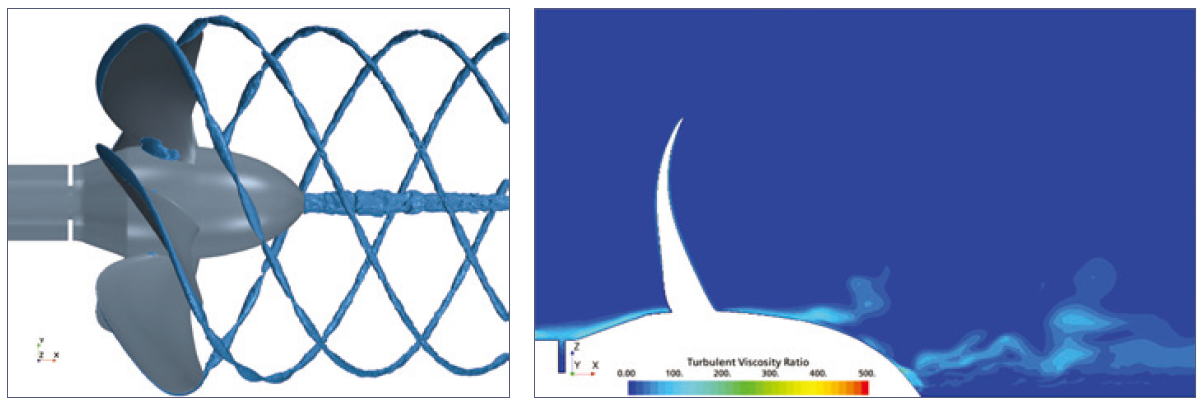 圖 14.5% 蒸汽體積分數的等值面(左)和紊流粘度比的等值線(右),來自螺旋槳周圍流的 DES 計算,使用最精細的網格,單個葉片具有 1700 萬個單元。
圖 14.5% 蒸汽體積分數的等值面(左)和紊流粘度比的等值線(右),來自螺旋槳周圍流的 DES 計算,使用最精細的網格,單個葉片具有 1700 萬個單元。
圖 15 中可以看出,翼端渦漩空化蝕內的壓力幾乎恒定, 略低於飽和壓力。然而,在空化區之外,壓力迅速增加,這可以從渦核周圍的密集壓力等值線看出。如圖15 所示,翼端渦漩內的流向速度分量也幾乎是恒定的, 但是渦核一側速度降低而另一側速度增加的梯度非常高。因此,為了成功解析翼端渦漩空蝕,我們需要一個精細網格來解析梢渦核周圍極端的壓力和速度梯度,還需要一個湍流模型梯度來避免在此區域存在高速度梯度的情況下產生高湍流粘度。空蝕模型似乎沒有那麼重要。圖 15 還顯示,在轂渦內靠近葉尖的一小塊區域內,
絕對壓力低於 -1,000 Pa。事實上,吸力側靠近前緣的最小壓力要低得多。如之前所述,這與以下因素有關:
因此,在流體速度高且氣泡在低壓區內停留時間短的情況下,液體中的絕對壓力可能為負。某些空化模型無法解釋這種行為的原因,有時甚至將其作為模型的品質特徵進行宣傳。然而,眾所周知,空化在很大程度上取決於液體純度。如果從水中去除所有固體顆粒和溶解的不凝性氣體,則壓力要下降到很低的水準才會產生空化現象。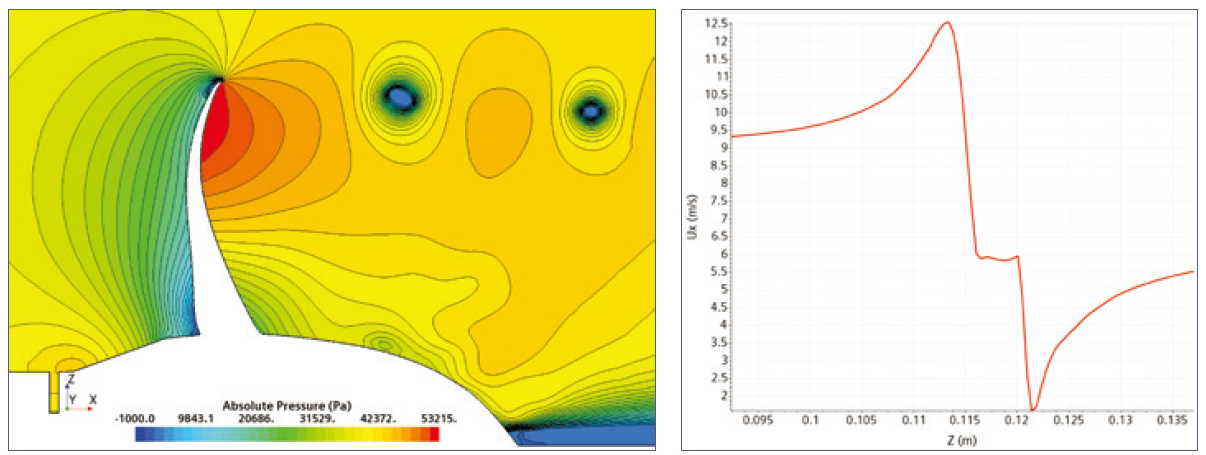
圖15. 螺旋槳葉片和槳轂縱截面中的絕對壓力等值線(左)和梢渦徑向方向上的流向速度分量曲線圖(右),來自螺旋槳周圍流的 DES 計算,使用單個葉片具有 1700 萬個單元的局部細化網格。
在許多流場中,需要解析的特徵會隨著時間的推移發生大小和形狀的變化。因此,能夠使網格自動適應不斷變化的流特徵非常重要。壁面附近空化氣泡的生長和潰滅便是這樣的例子。在此處詳述的示例中,氣泡的初始直徑選擇為 0.26 毫米,氣泡中心最初距離固體壁面 1.5 毫米。氣泡內的初始壓力取值為 100 巴,而液體中的壓力為大氣壓。氣泡被釋放並膨脹至最大直徑 2.2 毫米。
Simcenter STAR-CCM+ 包含一個自動調整網格細化Adaptive Mesh Refinement (AMR) 功能,可自動細化(和粗化)網格以捕獲複雜的流特徵。細化基於自由表面的位置。在此例中,為AMR 設置的最小單元尺寸為 3.125 µm。在 50 µm 的背景網格尺寸之上有四個永久粗化級別,如圖 16 所示。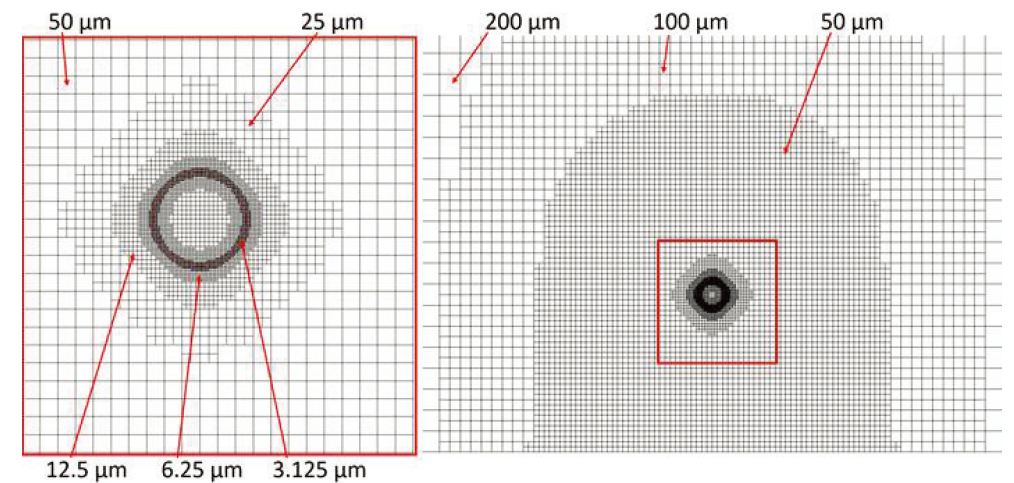
圖 16. 用於研究壁面附近氣泡生長和潰滅的初始網格(紅框內的細化由 AMR 根據自由表面的初始位置自動創建)。
如果沒有 AMR,我們需要大約 5 億個單元才能在生長和潰滅過程的介面移動體積中實現相同的解析度(以覆蓋最大氣泡直徑和到壁面的距離)。而使用AMR 可以始終確保所需的介面解析度,遠離介面的位置逐漸粗化,總單元數要低得多。單元數量在該過程的不同階段有所不同,從早期(小球形氣泡)的略高於 100 萬,到氣泡達到最大直徑時和氣泡最終潰滅階段的最大值(約 1000 萬個單元)。圖 17 顯示了氣泡大小隨時間的變化以及兩個時刻的相關網格。在氣泡生長階段,周圍液體被推開,氣泡由於液體慣性而過度膨脹。在潰滅階段,液體向介面回流。由於氣泡下方存在壁面,流是不對稱的,並且形成了穿透氣泡的液體射流,因此從氣泡中形成了環面。該射流以 80 m/s 的高衝擊速度撞擊壁面,這是形成空蝕的原因之一。AMR 以適度的計算成本使如此詳細的研究成為可能。
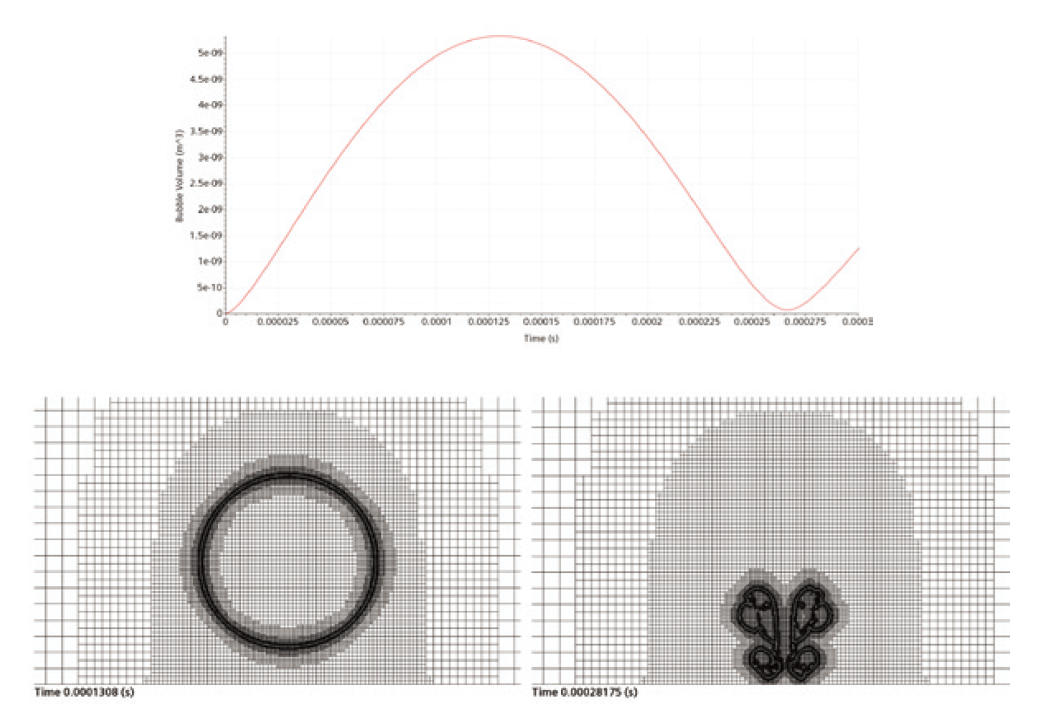 圖 17. 氣泡體積隨時間的變化(上)以及兩個時刻的網格剖面(下)。
圖 17. 氣泡體積隨時間的變化(上)以及兩個時刻的網格剖面(下)。
在氣泡生長階段,周圍液體被推開,氣泡由於液體慣性而過度膨脹。在潰滅階段,液體向介面回流。由於氣泡下方存在壁面,流是不對稱的,並且形成了穿透氣泡的液體射流,因此從氣泡中形成了環面。該射流以 80 m/s 的高衝擊速度撞擊壁面,這是形成空蝕的原因之一。AMR 以適度的計算成本使如此詳細的研究成為可能。
尺度效應在船舶流體動力學中起著重要作用:在模型尺寸和全尺寸的實驗中,幾乎不可能同時匹配佛羅德數和雷諾數。對於螺旋槳周圍空蝕流的研究也是如此。實驗中使用的模型尺寸螺旋槳比全尺寸螺旋槳小40 倍左右,並且旋轉速度更快。因此,在模型尺寸中,螺旋槳葉片在其旋轉一周時會出現空蝕現象,而在全尺寸中,空化現象僅在旋轉三分之一周時出現。有關比較的示例,請參見圖 18。如圖 18 所示,模型尺寸和全尺寸流之間的相似性是有限的,因此要從模型尺寸獲得的結果外推到全尺寸非常困難。
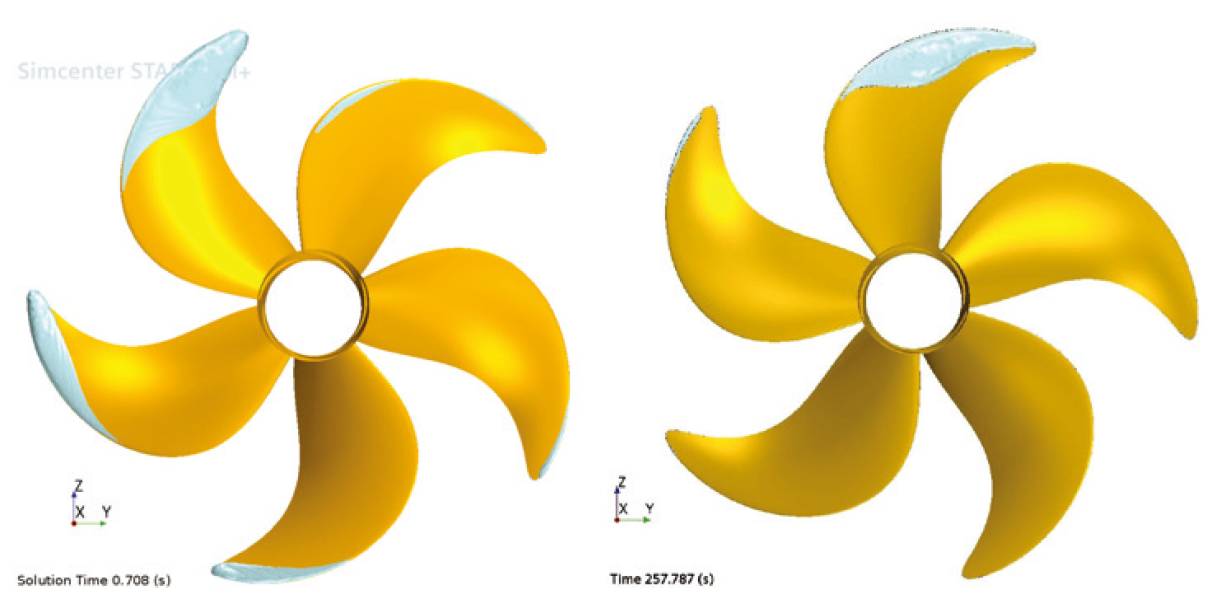
圖 18. 螺旋槳葉片上 5% 蒸汽體積分數的等值面:模型尺寸(左)和全尺寸(右)。
模型尺寸空化研究的另一個問題是,實驗通常在橫截面相對較小且沒有自由表面的空化水筒中進行。這意味著實驗室測試和全尺寸運行中的邊界條件截然不同。因此,實驗室螺旋槳周圍的流與存在自由表面且阻塞效應可忽略不計的情況下是不同的。來自空化水筒壁的壓力波反射也會造成問題,尤其是在研究螺旋槳葉片、槳舵和螺旋槳上方船體的壓力波動時。儘管我們通常認為實驗代表著真相,但這個真相並不是我們需要的,而且測量資料也會受到誤差的影響。對於名義上相同的流,不同實驗結果之間會存在差異,就像模擬和實驗之間也會存在差異一樣,這並不罕見。
進行全尺寸模擬的難度與模型尺寸相差無幾:與適合模型尺寸模擬的網格相比,我們只需減少近壁單元的厚度,就可以確保在邊界層的對數範圍記憶體在相同數量的單元。遠場邊界條件很容易施加,並且可以很容易地考慮自由表面波(來波和船舶引起的波)以及波浪中船舶運動所造成的影響。儘管 CFD 預測的品質已在模擬和實驗資料之間的大量比較中得到驗證,但我們對全尺寸模擬的信心仍然有限。原因是用於比較的全尺寸資料很少。根據我們的經驗,沒有任何跡象表明全尺寸 CFD 解的準確度會低於模型尺寸。我們希望在不久的將來可以獲得更多全尺寸測量資料,全尺寸模擬和分析也能夠越來越普遍。
本文探討了空蝕流(尤其是螺旋槳周圍的流)模擬的重要方面和面臨的諸多挑戰。CFD 空化模擬可以非常準確,也確實比模型尺寸的實驗更準確。但重要的是要瞭解誤差的潛在來源、誤差對結果的相對影響以及如何盡可能地減少誤差。如果網格在適當的區域內局部細化,則使用常見的空蝕模型能夠以令人滿意的精度預測螺旋槳上的空蝕現象。
捕獲翼端渦漩空蝕需要一個不會產生過高紊流粘度的紊流模型。LES 和 DES 模型是最佳選擇,但也有一些提議(例如 Reboud 修正)(18) 可以避免 RANS 模型中的過高湍流粘度,可能有用。計算網格對螺旋槳幾何體的精確再現也很重要。解析前緣曲率尤為重要:此處的網格解析度不足可能會使幾何體失真並影響分裂到螺旋槳葉片壓力側和吸力側的流。模擬也可用於研究製造公差(成品葉片形狀與CAD 模型相比)對流場和螺旋槳性能的影響。在船舶流體動力學中,最重要的任務之一是確定船體阻力,並選擇能以所需最低功率產生與阻力相匹配的推力的螺旋槳。由於尺度效應影響模型測試外推的準確性,而越來越多的證據表明全尺寸 CFD 模擬正在達到工程級精度,轉向進行實際運行條件下的全尺寸螺旋槳性能模擬必將成為最先進的高能效船舶設計方法。英國勞氏船級社於 2016 年組織的研討會表明, 使用最先進的 CFD 軟體能夠可靠地進行全尺寸自航模擬 (19),本文中顯示的示例也展示了全尺寸螺旋槳模擬的優勢。
CAE分析流程-CFD熱流模擬技巧,FVM有限體積法,FEM有限元素法